防患于未然 汽车主动安全技术前世今生
自适应巡航功能
四、自适应巡航功能
自适应巡航功能是车辆自行控制车速,并自动与前车保持一定安全距离的辅助驾驶功能。
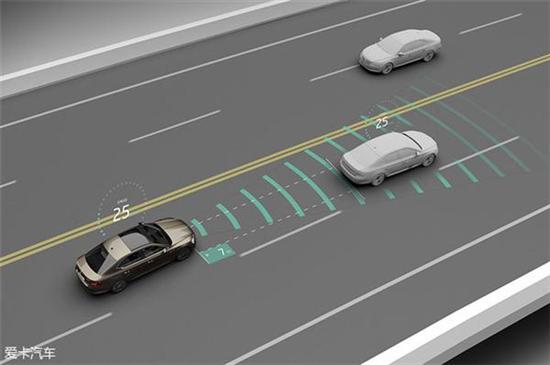
在车辆行驶过程中,车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,车辆会自动减速,以使车辆与前方车辆始终保持安全距离。
早期的巡航功能并没有现在这么强大,巡航开始后,车辆虽然能够通过雷达探测与前车的距离,但是并不能自动减速,而是通过发出警报来提醒驾驶者,让试驾者自己来进行刹车。

1992年,三菱为了提升旗舰的竞争力,在第三代Debonair车型上装备了定速巡航功能,通过激光测距传感器来判断与前车的距离,当车距过近时,车辆会对驾驶者进行提示。
随后在1995年,三菱Debonair进行了升级,激光测距传感器换成了测距雷达,并实现了自动减速,但当时的减速还是通过控制发动机节气门来实现的,而不是通过控制刹车来实现减速,使用感受非常不好。

直到1999年,奔驰才在自家旗舰S级上实现了自适应巡航。
编辑点评:最理想的汽车安全就是没有交通事故发生,汽车主动安全技术的发明正是为了实现这一目标。如今,不少车企相继在自动驾驶领域发力,理论上,自动驾驶功能正是这些主动安全技术的扩展与融合。从现阶段来看,我们的汽车生活离着零事故的理想状态还很遥远,汽车安全的发展任重而道远。
网友评论
更多>>
专栏・评论
热点新闻
 京公网安备:
京公网安备: