研究人员开发高效方法 确保车载摄像头方向
由于自动驾驶汽车通常使用内置摄像头来监测前方道路,因此,在驾驶过程中确保摄像头的方向固定非常关键。据外媒报道,韩国中央大学(Chung-Ang University)研究人员开发了一种高精度、高效的摄像头方向估计方法,将有助于保证自动驾驶汽车安全行驶。
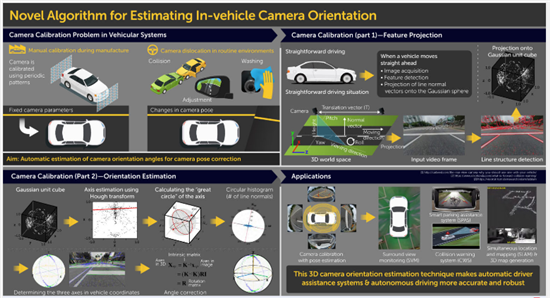
图片来源:韩国中央大学
随着汽车技术的进步,在不久的将来,大量的车辆将部署自动驾驶系统。为此,科学家们已经开发了摄像头和图像传感技术,将使自动驾驶车辆能够可靠地感知和“看清”周围环境。
在开发这项技术的过程中,研究人员面临各种各样的挑战。其中之一是在驾驶过程中保持内置摄像头的方向。自动驾驶汽车使用内置摄像头进行导航和测量距离,但是在动态驾驶时摄像头经常会脱落。中央大学的Joonki Paik教授解释道,“摄像头校准对未来的车辆系统,尤其是自动驾驶系统至关重要,因为摄像头参数,如焦距、旋转角度和平移矢量,对于分析现实世界中的3D信息是必不可少的。”
多年来,研究人员不断开发和改进车载摄像头的方位估计方法,包括投票算法等计算方法、使用高斯球面(Gaussian sphere)、应用深度学习和机器学习等。然而,在真实世界条件下,这些方法都无法足够快速地实时准确估算摄像头的方向。
为了解决估计速度的问题,由Paik教授领导的一组来自中央大学研究人员,结合先前开发的方法,提出了一种新的更精确、更有效的算法,专为车头的固定焦距摄像头而设计。
该算法包括三个步骤。首先,摄像头捕捉到车辆前方环境的图像,并将图像中物体上的平行线沿三个直角坐标轴映射。然后投影到高斯球面上,并提取这些平行线的平面法线。其次,采用特征提取技术霍夫变换(Hough transform),确定驾驶方向的“消失点”(消失点指某个角度拍摄的图像中平行线相交的点,如铁轨两侧在远处相交)。第三,使用圆形直方图,确定两个垂直的笛卡尔平面上的消失点。
该团队在曼哈顿真实驾驶条件下的道路上进行了实验,测试了此种方法。他们在三个视频中捕捉了三种驾驶环境,并记录此种方法在每种环境的准确性和效率。在两个场景中,该方法可以准确、稳定地估算摄像头方向。而在另一场景中,该方法表现不佳,因为摄像头视野范围内有许多树木和灌木。但总体而言,该方法在实际驾驶条件下表现良好。Paik博士与其团队表示,他们的方法之所以能够实现高速估计,是因为在估算过程的每一步中,3D投票空间都被转换成了2D平面。
更重要的是,Paik教授表示他们的方法“可以立即用于ADAS系统。”未来,也可用于其他应用,如避碰、泊车辅助和3D地图,从而防止事故,保证驾驶安全。
 京公网安备:
京公网安备: